


.jpg?width=500&height=500&name=%E8%B6%85%E5%A4%A7%E5%9E%8B%E4%BB%95%E6%A7%98%7C%E3%82%A2%E3%82%A4%E3%82%B3%E3%83%B3%20(1).jpg)










%E3%83%9A%E3%83%BC%E3%82%B8%7C%E3%82%A2%E3%82%A4%E3%82%B3%E3%83%B3.jpg?width=500&height=500&name=_%E3%83%9B%E3%83%AB%E3%83%80%E3%83%BC(%E4%BD%9C%E8%A3%BD%E4%BE%8B)%E3%83%9A%E3%83%BC%E3%82%B8%7C%E3%82%A2%E3%82%A4%E3%82%B3%E3%83%B3.jpg)



.jpg?width=500&height=500&name=%E5%90%B8%E7%9D%80%E3%83%91%E3%83%83%E3%83%88%E3%81%AE%E3%82%A2%E3%82%A4%E3%82%B3%E3%83%B3%7C%E6%A0%AA%E5%BC%8F%E4%BC%9A%E7%A4%BE%E3%83%8F%E3%83%BC%E3%83%A2%20(1).jpg)



%7C%E6%A0%AA%E5%BC%8F%E4%BC%9A%E7%A4%BE%E3%83%8F%E3%83%BC%E3%83%A2.jpg?width=500&height=500&name=%E3%83%AF%E3%83%B3%E3%82%BF%E3%83%83%E3%83%81%E3%82%A2%E3%82%BF%E3%83%83%E3%83%81%E3%83%A1%E3%83%B3%E3%83%88%7C%E3%83%9B%E3%83%AB%E3%83%80%E3%83%BC%20(%E5%8F%96%E5%87%BA%E6%A9%9F%E5%81%B4)%7C%E6%A0%AA%E5%BC%8F%E4%BC%9A%E7%A4%BE%E3%83%8F%E3%83%BC%E3%83%A2.jpg)
%7C%E6%A0%AA%E5%BC%8F%E4%BC%9A%E7%A4%BE%E3%83%8F%E3%83%BC%E3%83%A2.jpg?width=500&height=500&name=HC15BPX%7C%E3%83%AC%E3%83%90%E3%83%BC%E3%83%81%E3%83%A3%E3%83%83%E3%82%AF(%E3%83%95%E3%82%A3%E3%83%B3%E3%82%AC%E3%83%BC%E3%83%84%E3%83%BC%E3%83%AB%E4%BB%98)%7C%E6%A0%AA%E5%BC%8F%E4%BC%9A%E7%A4%BE%E3%83%8F%E3%83%BC%E3%83%A2.jpg)





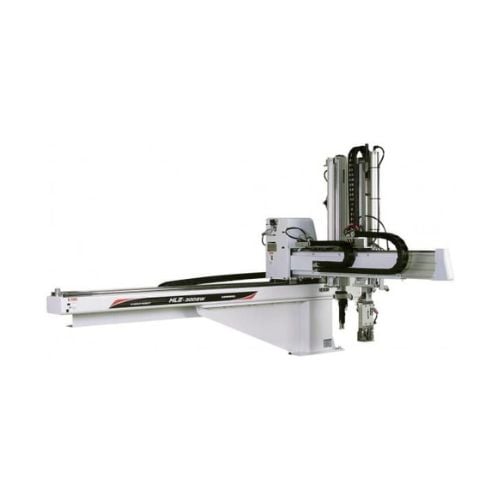
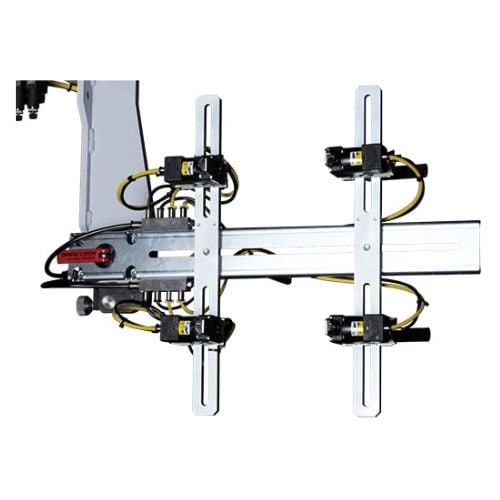
取出ロボットオプション
水平・垂直/旋回
姿勢サーボ機構
.jpg?width=1294&height=1641&name=%E5%A7%BF%E5%8B%A2%E3%82%B5%E3%83%BC%E3%83%9C%20(1).jpg)


姿勢サーボ機構(水平・垂直/旋回)
対象機種 HRXIII-100〜850 i/b シリーズ
2次工程との連動を飛躍的に効率アップ
水平・垂直及び旋回をサーボ駆動にて制御。
特殊形状製品における取り出しやアンダーカット、カメラ監査やストック、ゲートカット等の2次工程との連動を飛躍的に効率アップできます。
効率アップする2次工程業務
- 特殊形状製品における取り出し
- アンダーカット
- カメラ検査ストック
- ゲートカット等
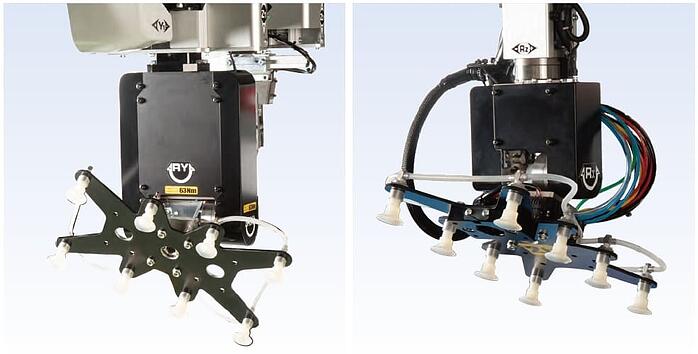
姿勢サーボ動作
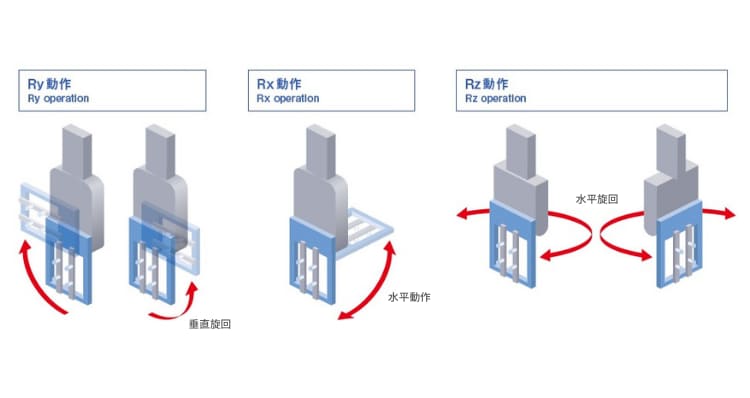
- Ryタイプ:水平動作+垂直旋回の2軸姿勢サーボ
- Rzタイプ:水平動作+水平旋回の2軸姿勢サーボ
姿勢サーボ機のダウンロード資料
取出しロボットの『姿勢サーボ機』を使った具体事例

姿勢サーボ機の特長、動作、使用の具体事例をPDF資料にまとめました。ダウンロードしてご活用ください。
こんな方におすすめの資料です
- 射出成形の設定に手間がかかる(射出成形機オペレーター様)
- 設備が異常で停止しても気付きにくい(生産ライン管理者様)
- 生産設備の問題点が特定できない(品質管理者様)
- 人手不足や4M変動解決のためにRPAを推進したい(工場責任者様)
- 生産性を向上してコストダウン、利益向上につなげたい(経営者様)
動画で見る取出ロボットの姿勢動作
製品仕様
Rz 2軸姿勢(100〜350シリーズ)
| Rz 7kg 姿勢 | Rz 12kg 姿勢(高トルク仕様) | |
|---|---|---|
| 可搬重量(kg) | 7 | 12 |
| Rx 軸動作角度(°) | 184 | 184 |
| Rz軸動作角度(°) | 320 | 320 |
| Rx軸最高速度(deg/sec) | 153 | 93 |
| Rz軸最高速度(deg/sec) | 240 | 200 |
| Rx軸定格出力(Nm) | 12.5 | 20.4 |
| Rz軸定格出力(Nm) | 8.0 | 9.5 |
| Rx軸許容最大トルク※ (Nm) | 32 | 63 |
| Rz軸許容最大トルク※(Nm) | 63 | 96 |
| Rz 7kg 姿勢 | Rz 12kg 姿勢(高トルク仕様) |
Ry 2軸姿勢(100〜350シリーズ)
| Ry 7kg 姿勢 | Ry 12kg 姿勢(高トルク仕様) | |
|---|---|---|
| 可搬重量(kg) | 7 | 12 |
| Rx 軸動作角度(°) | 190 | 190 |
| Rz軸動作角度(°) | 360 | 360 |
| Rx軸最高速度(deg/sec) | 153 | 93 |
| Rz軸最高速度(deg/sec) | 305 | 93 |
| Rx軸定格出力(Nm) | 12.5 | 20.4 |
| Rz軸定格出力(Nm) | 6.2 | 20.4 |
| Rx軸許容最大トルク※ (Nm) | 32 | 63 |
| Rz軸許容最大トルク※(Nm) | 23 | 63 |
| Ry 7kg 姿勢 | Ry 12kg 姿勢(高トルク仕様) |
取出ロボットの定期点検をお薦めします
安定生産のためにハーモがサポート
取出ロボットの急なトラブルを未然に防ぐためには、定期的な点検による予防保全が不可欠です。ハーモのサービス担当がお客様の取出ロボットを定期的に点検し、必要な部品交換や修理をご提案いたします。
また、成形現場の自動化や射出成形機の安全規格である『JIS B6711』の改訂など、プロならではの視点でお客様の生産に役立つサポートをいたします。お困りごとがございましたら、お気軽に担当各営業所にご相談ください。

取出ロボット点検診断サービスのお問い合わせ
射出成形に関するコンテンツ
射出成形について
射出成形の原理、基本機構、成形工程、成形機の種類、プラスチック樹脂の種類など、プラスチック成形にまつわる基礎知識をまとめています。詳しくは下記ページをご覧ください。
樹脂不足について
樹脂不足や樹脂価格高騰などの環境変化は射出成形加工業者様にとって大きな課題です。代替品樹脂の検討やリペレット化の推進、リサイクル率向上など、詳しくは下記ページをご覧ください。
成形不良について
株式会社ハーモでは射出成形の不良対策にお応えしています。成形周辺機器を工夫することで不良改善を実現し、品質向上を目指せることもあります。お気軽にご相談ください。詳しくは下記ページをご覧ください。
ゲートカットについて
ニッパ専門家に取材した射出成形のゲートカットの基礎知識のほか、待機ニッパによるゲートカット位置設定の課題 、ワンタッチ待機ニッパなど、段取り時間短縮についてまとめています。詳しくは下記ページをご覧ください。