


.jpg?width=500&height=500&name=%E8%B6%85%E5%A4%A7%E5%9E%8B%E4%BB%95%E6%A7%98%7C%E3%82%A2%E3%82%A4%E3%82%B3%E3%83%B3%20(1).jpg)










%E3%83%9A%E3%83%BC%E3%82%B8%7C%E3%82%A2%E3%82%A4%E3%82%B3%E3%83%B3.jpg?width=500&height=500&name=_%E3%83%9B%E3%83%AB%E3%83%80%E3%83%BC(%E4%BD%9C%E8%A3%BD%E4%BE%8B)%E3%83%9A%E3%83%BC%E3%82%B8%7C%E3%82%A2%E3%82%A4%E3%82%B3%E3%83%B3.jpg)



.jpg?width=500&height=500&name=%E5%90%B8%E7%9D%80%E3%83%91%E3%83%83%E3%83%88%E3%81%AE%E3%82%A2%E3%82%A4%E3%82%B3%E3%83%B3%7C%E6%A0%AA%E5%BC%8F%E4%BC%9A%E7%A4%BE%E3%83%8F%E3%83%BC%E3%83%A2%20(1).jpg)



%7C%E6%A0%AA%E5%BC%8F%E4%BC%9A%E7%A4%BE%E3%83%8F%E3%83%BC%E3%83%A2.jpg?width=500&height=500&name=%E3%83%AF%E3%83%B3%E3%82%BF%E3%83%83%E3%83%81%E3%82%A2%E3%82%BF%E3%83%83%E3%83%81%E3%83%A1%E3%83%B3%E3%83%88%7C%E3%83%9B%E3%83%AB%E3%83%80%E3%83%BC%20(%E5%8F%96%E5%87%BA%E6%A9%9F%E5%81%B4)%7C%E6%A0%AA%E5%BC%8F%E4%BC%9A%E7%A4%BE%E3%83%8F%E3%83%BC%E3%83%A2.jpg)
%7C%E6%A0%AA%E5%BC%8F%E4%BC%9A%E7%A4%BE%E3%83%8F%E3%83%BC%E3%83%A2.jpg?width=500&height=500&name=HC15BPX%7C%E3%83%AC%E3%83%90%E3%83%BC%E3%83%81%E3%83%A3%E3%83%83%E3%82%AF(%E3%83%95%E3%82%A3%E3%83%B3%E3%82%AC%E3%83%BC%E3%83%84%E3%83%BC%E3%83%AB%E4%BB%98)%7C%E6%A0%AA%E5%BC%8F%E4%BC%9A%E7%A4%BE%E3%83%8F%E3%83%BC%E3%83%A2.jpg)





ROBOT
射出成形成形品
取出ロボット



- HRXⅢ-30Sb/80Sb・Gb
-
- スタンダードタイプ
- 15〜70ton
- 2プレート/3プレート対応
- 小型
- 中型
- HRXⅢ-bシリーズ

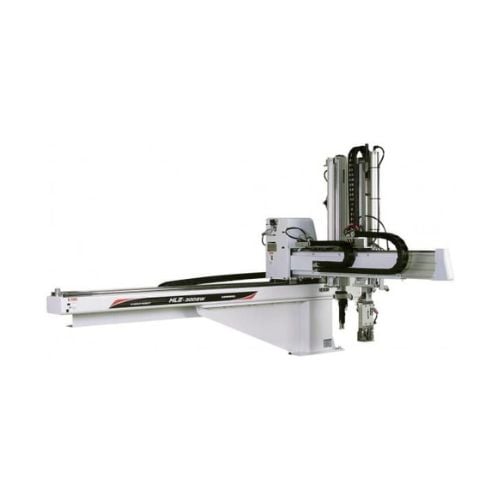
- HRXⅢ-80SWb・GWb
-
- スタンダードタイプ
- 40〜70ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- HRXⅢ-bシリーズ
- 取り出しロボット

- HRXⅢ-100/150/250Sb・Gb(Ry/Rz)
-
- スタンダードタイプ
- 75〜350ton
- 2プレート/3プレート対応
- 中型
- 姿勢2軸サーボ機構に対応
- HRXⅢ-bシリーズ
- 取り出しロボット

- HRXⅢ-100/150/250SWb・GWb(Ry/Rz)
-
- スタンダードタイプ
- 75〜350ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- 姿勢2軸サーボ機構に対応
- HRXⅢ-bシリーズ
- 取り出しロボット

- HRXⅢ-350/550SWb・GWb(Ry/Rz)
-
- スタンダードタイプ
- 250〜500ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- 大型
- 姿勢2軸サーボ機構に対応
- HRXⅢ-bシリーズ
- 取り出しロボット

- HRXⅢ-800/1000SWb-Rx・GWb-Rx(Rz/Ry)
-
- スタンダードタイプ
- 400〜1300ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- 大型
- 姿勢2軸サーボ機構に対応
- HRXⅢ-bシリーズ
- 取り出しロボット

- HRXⅢ-100/150/250Si・Gi(Ry/Rz)
-
- ハイパフォーマンスタイプ
- 75〜350ton
- 2プレート/3プレート対応
- 中型
- CE対応(オプション)
- 姿勢2軸サーボ機構に対応
- HRXⅢ-iシリーズ
- 取り出しロボット

- HRXⅢ-100/150/250SWi・GWi(-W)(Ry/Rz)
-
- ハイパフォーマンスタイプ
- 75〜250ton
- 2プレート/3プレート対応
- 中型
- 低天井タイプ
- CE対応(オプション)
- 姿勢2軸サーボ機構に対応
- HRXⅢ-iシリーズ
- 取り出しロボット

- HRXⅢ-350/550SWi・GWi(Ry/Rz)
-
- ハイパフォーマンスタイプ
- 250〜600ton
- 2プレート/3プレート対応
- 中型
- 大型
- 低天井タイプ
- CE対応(オプション/350のみ)
- 姿勢2軸サーボ機構に対応
- HRXⅢ-iシリーズ
- 取り出しロボット

- HRXⅢ-50/80Sa・Ga
-
- コストパフォーマンスタイプ
- 15〜80ton
- 2プレート/3プレート対応
- 小型
- 中型
- HRXⅢ-aシリーズ
- 取り出しロボット

- HRXⅢ-80SWa・GWa
-
- コストパフォーマンスタイプ
- 40〜70ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- HRXⅢ-aシリーズ
- 取り出しロボット

- HRXⅢ-150/250Sa・Ga
-
- コストパフォーマンスタイプ
- 120〜350ton
- 2プレート/3プレート対応
- 中型
- HRXⅢ-aシリーズ
- 取り出しロボット

- HRXⅢ-150/250SWa・GWa
-
- コストパフォーマンスタイプ
- 120〜350ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- HRXⅢ-aシリーズ
- 取り出しロボット

- HRXⅢ-350/550SWa・GWa
-
- コストパフォーマンスタイプ
- 250〜600ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- 大型
- HRXⅢ-aシリーズ
- 取り出しロボット

- ARXⅢ-50/80S・G
-
- 海外限定
- 小型
- 中型
- 15〜80ton
- 2プレート/3プレート対応
- ARXⅢシリーズ
- 取り出しロボット

- ARXⅢ-80SW・GW
-
- 海外限定
- 小型
- 40〜70ton
- 2プレート/3プレート対応
- 低天井タイプ
- ARXⅢシリーズ
- 取り出しロボット

- ARXⅢ-150/250S・G
-
- 海外限定
- 中型
- 120〜350ton
- 2プレート/3プレート対応
- ARXⅢシリーズ
- 取り出しロボット

- ARXⅢ-150/250SW・GW
-
- 海外限定
- 中型
- 120〜350ton
- 2プレート/3プレート対応
- 低天井タイプ
- ARXⅢシリーズ
- 取り出しロボット

- ARXⅢ-350/550SW・GW
-
- 海外限定
- 大型
- 250〜600ton
- 2プレート/3プレート対応
- 低天井タイプ
- ARXⅢシリーズ
- 取り出しロボット

- TRX-2100/2500/2600Si
-
- 超大型仕様
- 850〜1300ton
- 2プレート対応
- TRXシリーズ
- 取り出しロボット

- TRX-2800/3200Si
-
- 超大型仕様
- 1400〜2500ton
- 2プレート対応
- TRXシリーズ
- 取り出しロボット

- EX4-60(F)/150(F)
-
- スイングタイプ
- エア駆動タイプ
- 20〜150ton
- 2プレート対応
- CE対応(オプション)
- EX4シリーズ
- 取り出しロボット

- EXZⅡ-600(F)/800(F)
-
- スイングタイプ
- 2軸サーボ駆動
- 2プレート対応
- EXZⅡシリーズ
- 取り出しロボット

- EX4-60G/150G
-
- スイングタイプ
- エア駆動タイプ
- 20〜150ton
- 3プレート対応
- EX4シリーズ
- 取り出しロボット

- VW4-500R/750R/1000R
-
- 竪型射出成形機用
- エア駆動タイプ
- 150ton以下
- Vシリーズ
- 取り出しロボット

- VW4-500TR/750TR/1000TR
-
- 竪型射出成形機用
- エア駆動タイプ
- 150ton以下
- Vシリーズ
- 取り出しロボット

- VHⅡ-500R/750R
-
- 竪型射出成形機用
- スプル専用
- 50〜150ton以下
- Vシリーズ
- 取り出しロボット

- SHⅡ-700GH
-
- 精密射出成形品向け
- ハイサイクルタイプ
- 15〜50ton
- 3プレート対応
- SHシリーズ
- 取り出しロボット

- LXⅡ-15
-
- 小型成形機用(ランナ取出)
- スイングタイプ
- ハイサイクルタイプ
- LXⅡシリーズ
- 取り出しロボット

- EXⅢ-15
-
- スイングタイプ
- 小型成形機用(15ton以下)
- EXⅢシリーズ
- 取り出しロボット

- SH-400/700
-
- 精密射出成形品向け
- 15〜50ton
- 2プレート対応
- SHシリーズ
- 取り出しロボット

- HRXⅢ-800/1000SWi-Rx・GWi-Rx(Rz/Ry)
-
- ハイパフォーマンスタイプ
- 550〜1300ton
- 2プレート/3プレート対応
- 大型
- 姿勢2軸サーボ機構に対応
- HRXⅢ-iシリーズ
- 取り出しロボット

- SH-400G/700G
-
- 精密射出成形品向け
- 15〜50ton
- 3プレート対応
- SHシリーズ
- 取り出しロボット

- HRXⅢ-150/250Si・SWi-PT
-
- 縦トラバースタイプ
- 120〜350ton
- 2プレート対応
- 低天井タイプ
- HRXⅢ-iシリーズ
- 取り出しロボット
.jpg?width=340&height=180&name=%E5%A7%BF%E5%8B%A2%E3%82%B5%E3%83%BC%E3%83%9C%20(1).jpg)
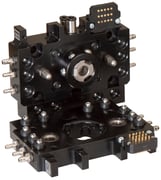
- 姿勢サーボ機構(水平・垂直/旋回)
-
- 姿勢サーボ機構
- 水平・垂直/旋回
- 対象機種 HRXIII-100〜850 i/b シリーズ
- 取出ロボットオプション
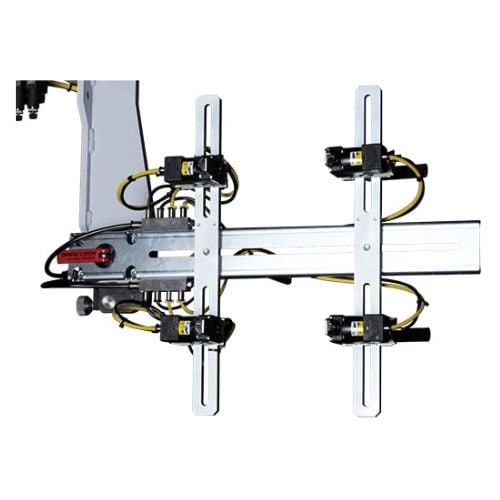
- スマートハンドアダプタ
-
- 10kg可搬ボート無し
- 10kg可搬ボート有り
- 35kg可搬ボート有り
- 対象機種 HRXIII-100〜850 i/b シリーズ
- 取出ロボットオプション

- TRX-3600/4000Si
-
- 超大型仕様
- 最大クラス
- 2000〜4000ton
- 2プレート対応
- TRXシリーズ
- 取り出しロボット

- HSX-150/250SW i
-
- ハイサイクルタイプ
- 120〜350 ton
- 2プレート対応
- 低天井タイプ
- HSX シリーズ
- 取り出しロボット

- HRXⅢ-150SWb-Rz-PT・GWb-Rz-PT
-
- 縦トラバースタイプ
- 120〜350ton
- 2プレート対応
- 低天井タイプ
- HRXⅢ-iシリーズ
- 取り出しロボット
HRXⅢ-b シリーズ(スタンダードタイプ)
トラバースタイプ|サーボモータ駆動取出ロボット
- HRXⅢ-30Sb/80Sb・Gb
-
- スタンダードタイプ
- 15〜70ton
- 2プレート/3プレート対応
- 小型
- 中型
- HRXⅢ-bシリーズ
- HRXⅢ-80SWb・GWb
-
- スタンダードタイプ
- 40〜70ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- HRXⅢ-bシリーズ
- 取り出しロボット
- HRXⅢ-100/150/250Sb・Gb(Ry/Rz)
-
- スタンダードタイプ
- 75〜350ton
- 2プレート/3プレート対応
- 中型
- 姿勢2軸サーボ機構に対応
- HRXⅢ-bシリーズ
- 取り出しロボット
- HRXⅢ-100/150/250SWb・GWb(Ry/Rz)
-
- スタンダードタイプ
- 75〜350ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- 姿勢2軸サーボ機構に対応
- HRXⅢ-bシリーズ
- 取り出しロボット
- HRXⅢ-350/550SWb・GWb(Ry/Rz)
-
- スタンダードタイプ
- 250〜500ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- 大型
- 姿勢2軸サーボ機構に対応
- HRXⅢ-bシリーズ
- 取り出しロボット
- HRXⅢ-800/1000SWb-Rx・GWb-Rx(Rz/Ry)
-
- スタンダードタイプ
- 400〜1300ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- 大型
- 姿勢2軸サーボ機構に対応
- HRXⅢ-bシリーズ
- 取り出しロボット
- HRXⅢ-150SWb-Rz-PT・GWb-Rz-PT
-
- 縦トラバースタイプ
- 120〜350ton
- 2プレート対応
- 低天井タイプ
- HRXⅢ-iシリーズ
- 取り出しロボット
HRXⅢ-iシリーズ(ハイパフォーマンスタイプ)
トラバースタイプ|サーボモータ駆動取出ロボット
- HRXⅢ-100/150/250Si・Gi(Ry/Rz)
-
- ハイパフォーマンスタイプ
- 75〜350ton
- 2プレート/3プレート対応
- 中型
- CE対応(オプション)
- 姿勢2軸サーボ機構に対応
- HRXⅢ-iシリーズ
- 取り出しロボット
- HRXⅢ-100/150/250SWi・GWi(-W)(Ry/Rz)
-
- ハイパフォーマンスタイプ
- 75〜250ton
- 2プレート/3プレート対応
- 中型
- 低天井タイプ
- CE対応(オプション)
- 姿勢2軸サーボ機構に対応
- HRXⅢ-iシリーズ
- 取り出しロボット
- HRXⅢ-350/550SWi・GWi(Ry/Rz)
-
- ハイパフォーマンスタイプ
- 250〜600ton
- 2プレート/3プレート対応
- 中型
- 大型
- 低天井タイプ
- CE対応(オプション/350のみ)
- 姿勢2軸サーボ機構に対応
- HRXⅢ-iシリーズ
- 取り出しロボット
- HRXⅢ-800/1000SWi-Rx・GWi-Rx(Rz/Ry)
-
- ハイパフォーマンスタイプ
- 550〜1300ton
- 2プレート/3プレート対応
- 大型
- 姿勢2軸サーボ機構に対応
- HRXⅢ-iシリーズ
- 取り出しロボット
- HRXⅢ-150/250Si・SWi-PT
-
- 縦トラバースタイプ
- 120〜350ton
- 2プレート対応
- 低天井タイプ
- HRXⅢ-iシリーズ
- 取り出しロボット
HRXⅢ-aシリーズ(コストパフォーマンスタイプ)
トラバースタイプ|サーボモータ駆動取出ロボット
- HRXⅢ-50/80Sa・Ga
-
- コストパフォーマンスタイプ
- 15〜80ton
- 2プレート/3プレート対応
- 小型
- 中型
- HRXⅢ-aシリーズ
- 取り出しロボット
- HRXⅢ-80SWa・GWa
-
- コストパフォーマンスタイプ
- 40〜70ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- HRXⅢ-aシリーズ
- 取り出しロボット
- HRXⅢ-150/250Sa・Ga
-
- コストパフォーマンスタイプ
- 120〜350ton
- 2プレート/3プレート対応
- 中型
- HRXⅢ-aシリーズ
- 取り出しロボット
- HRXⅢ-150/250SWa・GWa
-
- コストパフォーマンスタイプ
- 120〜350ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- HRXⅢ-aシリーズ
- 取り出しロボット
- HRXⅢ-350/550SWa・GWa
-
- コストパフォーマンスタイプ
- 250〜600ton
- 2プレート/3プレート対応
- 低天井タイプ
- 中型
- 大型
- HRXⅢ-aシリーズ
- 取り出しロボット
HSXシリーズ(ハイサイクルタイプ)
トラバースタイプ|サーボモータ駆動取出ロボット
ARXⅢシリーズ(海外限定)
海外限定の成形品取出ロボット
- ARXⅢ-50/80S・G
-
- 海外限定
- 小型
- 中型
- 15〜80ton
- 2プレート/3プレート対応
- ARXⅢシリーズ
- 取り出しロボット
- ARXⅢ-80SW・GW
-
- 海外限定
- 小型
- 40〜70ton
- 2プレート/3プレート対応
- 低天井タイプ
- ARXⅢシリーズ
- 取り出しロボット
- ARXⅢ-150/250S・G
-
- 海外限定
- 中型
- 120〜350ton
- 2プレート/3プレート対応
- ARXⅢシリーズ
- 取り出しロボット
- ARXⅢ-150/250SW・GW
-
- 海外限定
- 中型
- 120〜350ton
- 2プレート/3プレート対応
- 低天井タイプ
- ARXⅢシリーズ
- 取り出しロボット
- ARXⅢ-350/550SW・GW
-
- 海外限定
- 大型
- 250〜600ton
- 2プレート/3プレート対応
- 低天井タイプ
- ARXⅢシリーズ
- 取り出しロボット